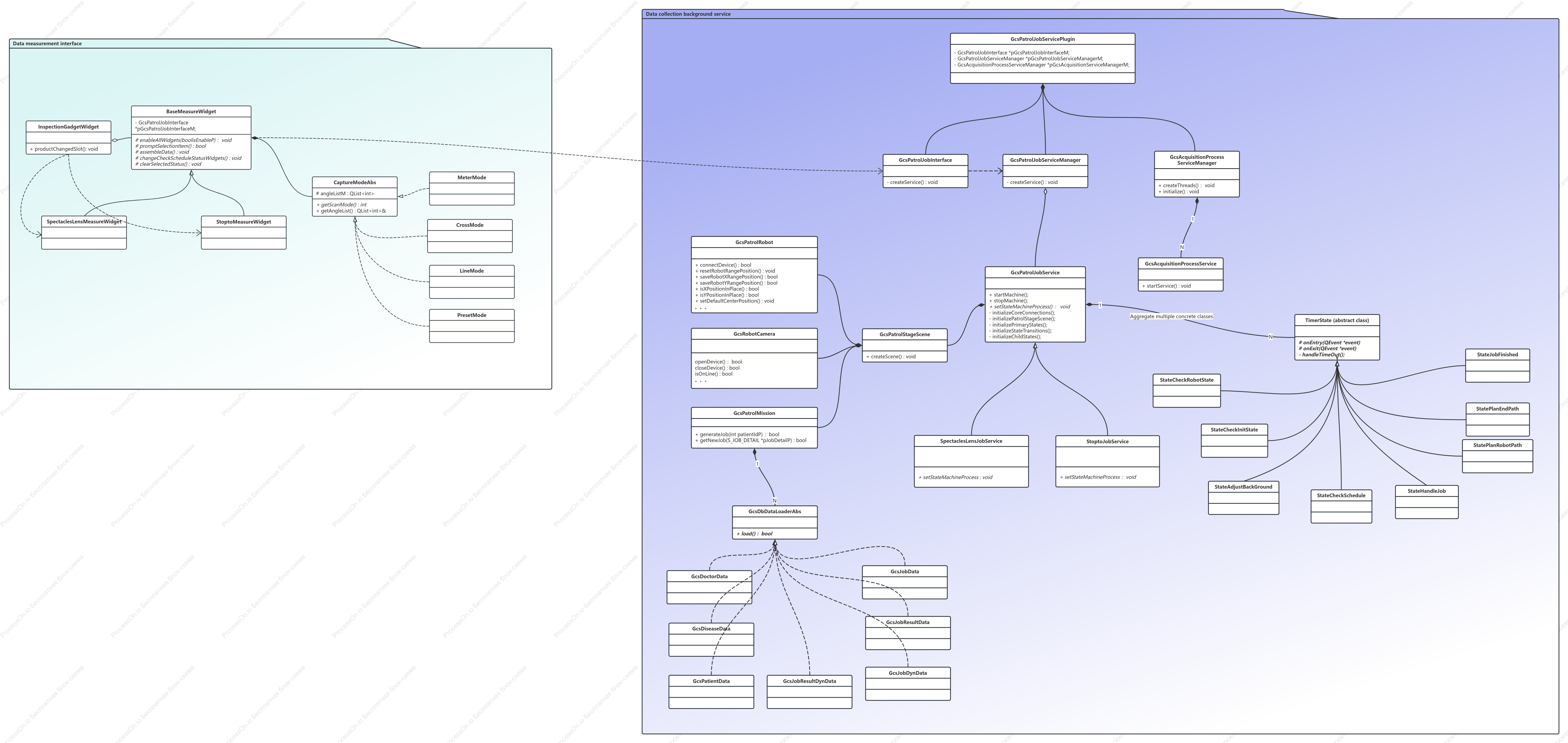

Схема вариантов использования подсистемы сбора данных
0 Oтчет
Данная блок-схема иллюстрирует варианты использования подсистемы сбора данных, акцентируя внимание на ключевых компонентах и процессах, связанных с управлением патрульными заданиями и сбором данных. Основные элементы включают в себя интерфейсы и менеджеры служб, такие как GcsPatrolJobServicePlugin и GcsAcquisitionProcessServiceManager, которые обеспечивают создание и управление сервисами, а также обработку данных. Классы состояния, такие как TimerState и StatePlanRobotPath, управляют временными переходами и планированием маршрутов роботов. Функции, связанные с режимами работы, такие как CaptureModeAbs и MeterMode, определяют параметры сканирования и измерения. Подсистема также включает в себя взаимодействие с устройствами, например, с помощью GcsRobotCamera, и управление патрульными сценами через GcsPatrolStageScene. Эта схема предоставляет целостное представление о функциональности и взаимодействии различных компонентов системы.
Связанные рекомендации
Другие работы автора
План/Содержание
Смотреть больше
GcsPatrolJobServicePlugin
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;- GcsPatrolJobServiceManager *pGcsPatrolJobServiceManagerM;- GcsAcquisitionProcessServiceManager *pGcsAcquisitionServiceManagerM;
TimerState (abstract class)
# onEntry(QEvent *event)# onExit(QEvent *event)- handleTimeOut();
StatePlanRobotPath
GcsJobDynData
GcsDiseaseData
CaptureModeAbs
# angleListM : QList<int>
+ getScanMode() : int+ getAngleList() : QList<int>&
GcsPatrolJobService
+ startMachine();+ stopMachine();+ setStateMachineProcess() : void- initializeCoreConnections(); - initializePatrolStageScene();- initializePrimaryStates(); - initializeStateTransitions();- initializeChildStates();
CrossMode
GcsPatientData
StatePlanEndPath
MeterMode
GcsPatrolStageScene
+ createScene() : void
StateCheckInitState
StateJobFinished
StoptoJobService
+ setStateMachineProcess :void
GcsJobResultData
N
1
StoptoMeasureWidget
GcsJobData
InspectionGadgetWidget
+ productChangedSlot(): void
GcsPatrolMission
+ generateJob(int patientIdP) :bool+ getNewJob(S_JOB_DETAIL *pJobDetailP) : bool
GcsPatrolJobInterface
- createService() : void
StateCheckSchedule
GcsRobotCamera
openDevice() :boolcloseDevice() : boolisOnLine() : bool。。。
GcsPatrolJobServiceManager
BaseMeasureWidget
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;
# enableAllWidgets(boolisEnableP) :void# promptSelectionItem() : bool# assembleData() : void# changeCheckScheduleStatusWidgets() : void# clearSelectedStatus() : void
GcsDoctorData
StateHandleJob
SpectaclesLensMeasureWidget
Data collection background service
GcsDbDataLoaderAbs
+ load() : bool
StateCheckRobotState
PresetMode
Aggregate multiple concrete classes
SpectaclesLensJobService
+ setStateMachineProcess : void
Data measurement interface
StateAdjustBackGround
GcsAcquisitionProcessServiceManager
+ createThreads() :void+ initialize() : void
GcsAcquisitionProcessService
+ startService() : void
GcsJobResultDynData
LineMode
GcsPatrolRobot
+ connectDevice() : bool+ resetRobotRangePosition() : void+ saveRobotXRangePosition() : bool+ saveRobotYRangePosition() : bool+ isXPositionInPlace() : bool+ isYPositionInPlace() : bool+ setDefaultCenterPosition() : void。。。
Cобирать
Cобирать
Cобирать
Cобирать

0 Комментарии
Следующая страница