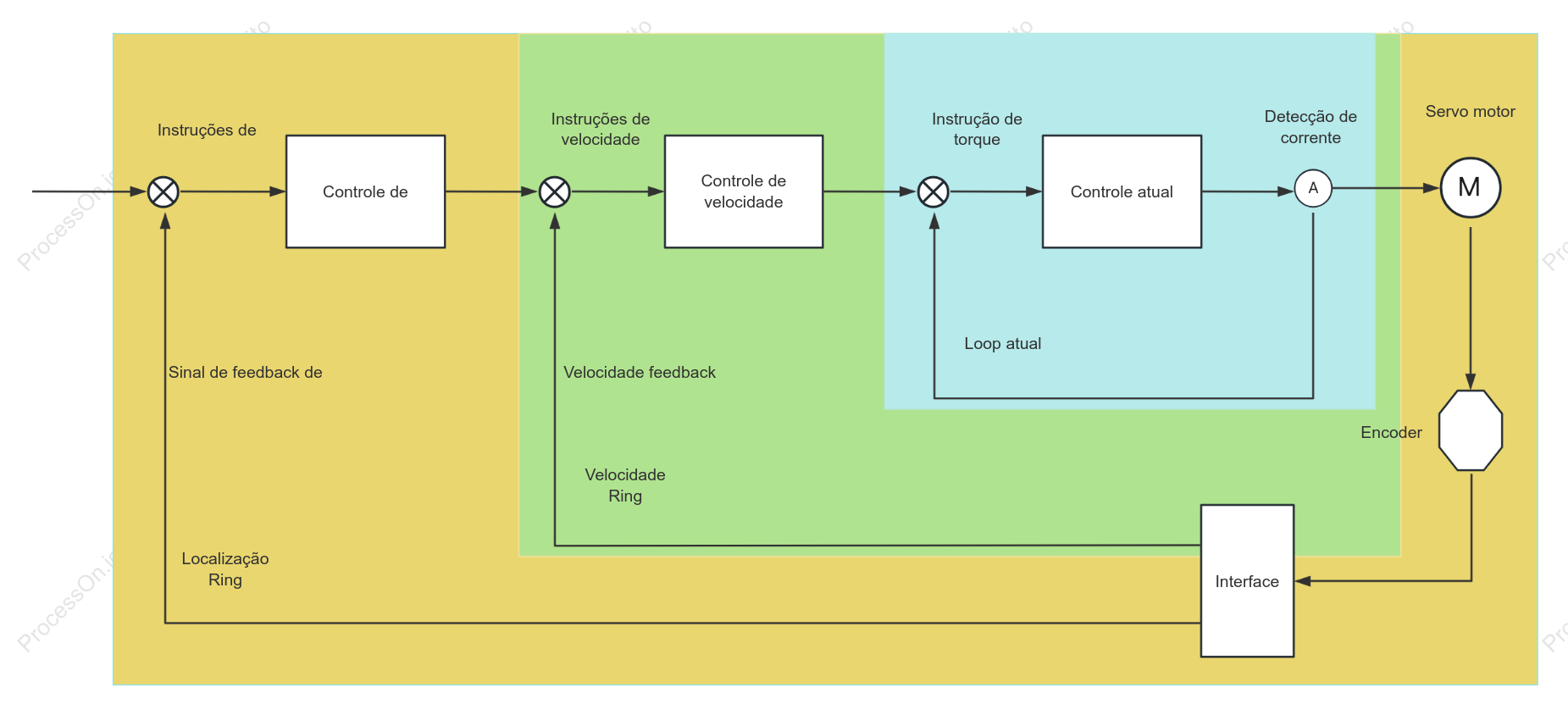

Estrutura de Malha Fechada de um Sistema Servo
0 Relatório
Uma estrutura de malha fechada em um sistema servo é um método de controle que permite o controle preciso da saída do sistema através da introdução de um laço de realimentação. Essa estrutura compreende quatro partes principais: um controlador, atuadores, sensores e o objeto controlado. O controlador gera sinais de controle com base em pontos de ajuste e nas informações do estado atual do sistema, provenientes dos sensores; os atuadores recebem os sinais de controle e controlam o objeto controlado; os sensores detectam as informações de estado do objeto controlado e as realimentam para o controlador; o objeto controlado é o equipamento ou processo real que precisa ser controlado. Esse método de controle em malha fechada melhora efetivamente a estabilidade e a precisão do sistema e é amplamente utilizado em diversos sistemas de controle industrial, sistemas robóticos, etc.
Recomendações relacionadas
Outras obras do autor
Esboço/Conteúdo
Ver mais
Encoder
Detecção de corrente
Localização Ring
Interface
Instruções de
Loop atual
Velocidade feedback
Controle de velocidade
Sinal de feedback de
Servo motor
Instruções de velocidade
Velocidade Ring
Controle atual
Controle de
Instrução de torque
Coletar
Coletar

Collect

0 Comentários
Próxima página