
Structure en boucle fermée d'un servosystème
0 Rapport
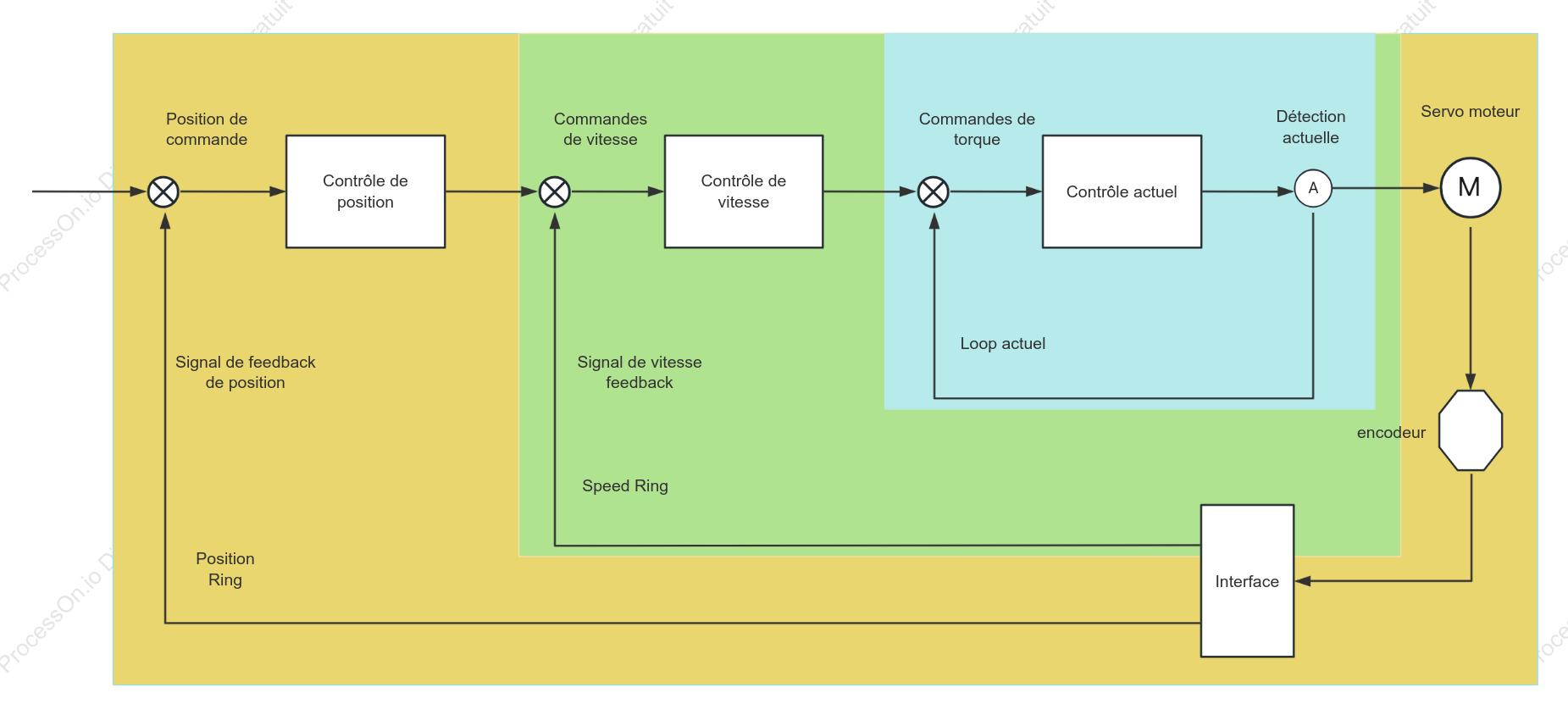
Une structure en boucle fermée de servosystème est une méthode de commande qui assure un contrôle précis de la sortie du système grâce à une boucle de rétroaction. Cette structure comprend quatre parties principales : un contrôleur, des actionneurs, des capteurs et l'objet contrôlé. Le contrôleur génère des signaux de commande à partir des consignes et des informations d'état du système fournies par les capteurs ; les actionneurs reçoivent ces signaux et pilotent l'objet contrôlé ; les capteurs détectent l'état de l'objet contrôlé et le transmettent au contrôleur ; l'objet contrôlé correspond à l'équipement ou au processus à piloter. Cette méthode de commande en boucle fermée améliore efficacement la stabilité et la précision du système et est largement utilisée dans divers systèmes de contrôle industriel, systèmes robotiques, etc.
Recommandations connexes
Autres œuvres de l'auteur
Plan/Contenu
Voir plus
encodeur
Détection actuelle
Position Ring
Interface
Position de commande
Loop actuel
Signal de vitesse feedback
Contrôle de vitesse
Signal de feedback de position
Servo moteur
Commandes de vitesse
Speed Ring
Contrôle actuel
Contrôle de position
Commandes de torque
Collecter
Collecter

Collecter
Collecter

0 Commentaires
Page suivante