
Estructura de lazo cerrado para sistemas servo
0 Informe
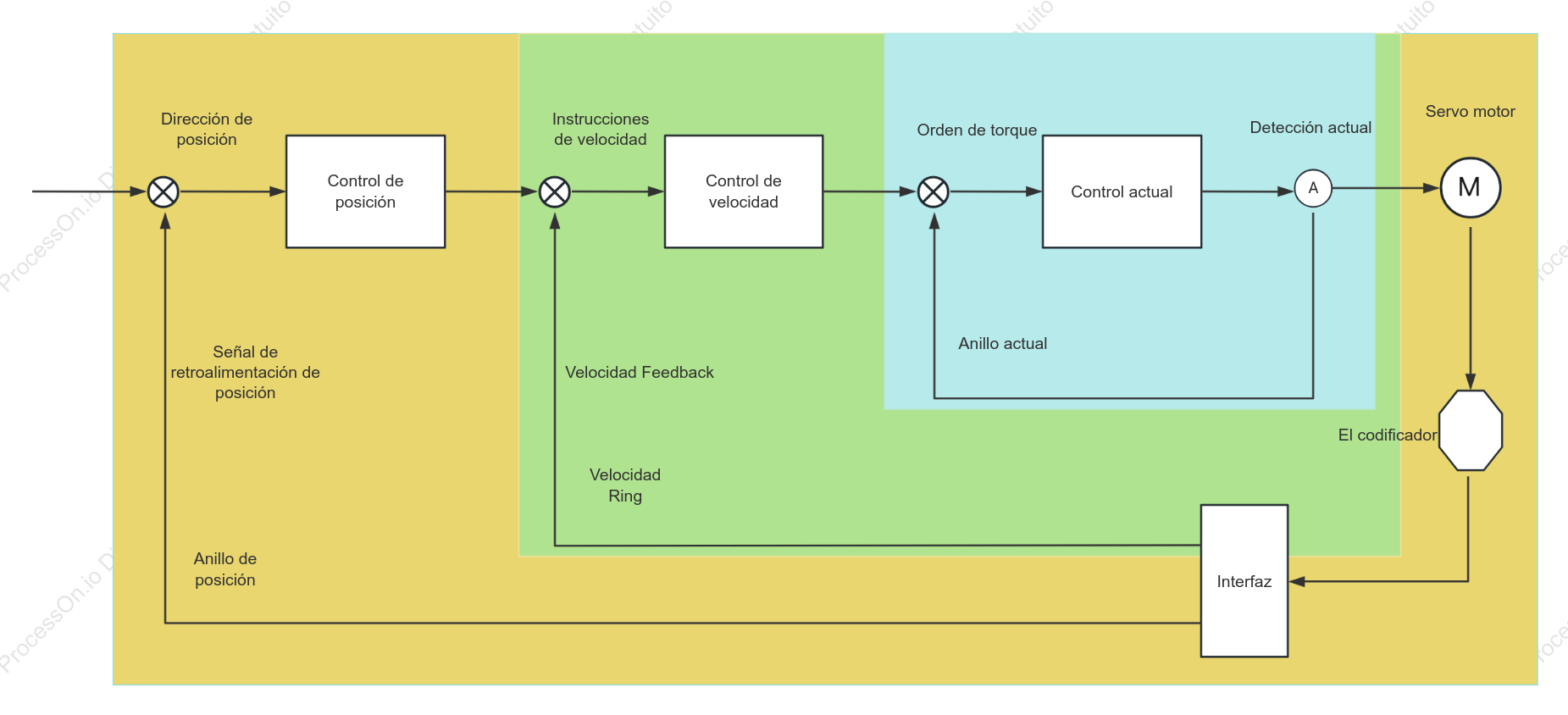
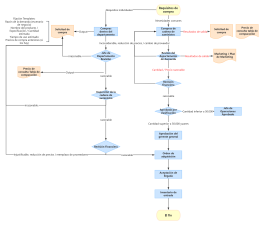
La estructura de lazo cerrado para sistemas servo es un método de control que logra un control preciso de la salida del sistema mediante la introducción de un lazo de retroalimentación. Esta estructura consta de cuatro partes principales: un controlador, actuadores, sensores y el objeto controlado. El controlador genera señales de control basadas en puntos de consigna y la información del estado actual del sistema, retroalimentada por los sensores; los actuadores reciben las señales de control y controlan el objeto; los sensores detectan la información del estado del objeto y la retroalimentan al controlador; el objeto controlado es el equipo o proceso que se necesita controlar. Este método de control de lazo cerrado mejora eficazmente la estabilidad y la precisión del sistema y se utiliza ampliamente en diversos sistemas de control industrial, sistemas robóticos, etc.
Recomendaciones relacionadas
Otras obras del autor
Esquema/Contenido
Ver más
El codificador
Detección actual
Anillo de posición
Interfaz
Dirección de posición
Anillo actual
Velocidad Feedback
Control de velocidad
Señal de retroalimentación de posición
Servo motor
Instrucciones de velocidad
Velocidad Ring
Control actual
Control de posición
Orden de torque




0 Comentarios
Página siguiente